Chinese
English
Home
About
Introduction
Milestone
Culture
Member unit
Awards
Distribution
Intelligent Equipment
Platform for industrial robots
Scientific research
Introduction to academia sinica
Research field of academia sinica
Academia sinica research team
News
Company news
Industry news
Video center
Investor
Announcement
Governance
Securities information
Investor relations document
Investor services
Talent
Talent strategy
Job recruitment
Service
Partner
Service case
Download information
Contact us
Integrity Office
Chinese
English
Home
About
Introduction
Milestone
Culture
Member unit
Awards
Distribution
Intelligent Equipment
Platform for industrial robots
Scientific research
Introduction to academia sinica
Research field of academia sinica
Academia sinica research team
News
Company news
Industry news
Video center
Investor
Announcement
Governance
Securities information
Investor relations document
Investor services
Talent
Talent strategy
Job recruitment
Service
Partner
Service case
Download information
Contact us
Integrity Office
四轴机器人和六轴机器人有什么区别?
作者:哈工智能 日期:2019.12.28
关节机器人(Robot joints),也称关节手臂机器人或关节机械手臂,是当今工业领域中最常见的工业机器人的形态之一,适合用于诸多工业领域的机械自动化作业,
比如,自动装配、喷漆、搬运、焊接等工作,按照构造它有不同的分类。在工业生产中最常见的是四轴工业机器人和六轴工业机器人。
轴与笛卡尔坐标
所谓工业机器人的轴,可以用专业的名词“自由度”来解释。当机器人的轴数增加,机器人将具有更高的灵活性。
四轴SCARA机器人(以下简称“四轴机器人”)特别为高速取放作业而设计,六轴关节式机器人(以下简称“六轴机器人”)则提供更高的生产运动灵活性。
轴与笛卡尔坐标系息息相关。三轴机器人也被称为直角坐标或者笛卡尔机器人,它的三个轴可以允许机器人沿三个轴的方向进行运动;而六轴机器人中的六个轴,由一二三轴控制对象在空间的位置,四五六轴控制对象在空间的姿态。
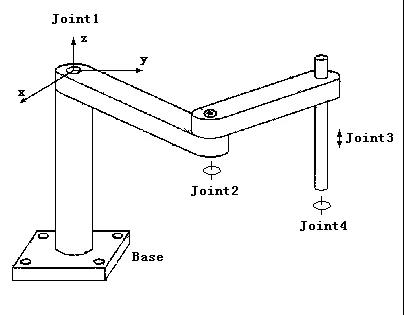
首先把各轴的运动方式说明一下。
一轴
第一轴是连接底座的部位,主要是承载上面轴的重量与底座的左右旋转,一个左右旋转的动作就是使用电机与减速机传动的结果,每个轴都是代替一个方向的运动方式。
二轴
控制机器人主臂的前后摆动,整个主臂上下运动的功能。
三轴
三轴同样是控制机器人前后摆动功能,只是比第二轴的摆臂范围小。
四轴
四轴是控制机器人上面的圆形管的部分,可以自由旋转,活动范围相当于人的小臂,不过不是360°旋转,里面有电线,跟人小臂的旋转范围大致相同。
五轴
第五轴控制微调的上下翻转动作,通常是当产品抓取后可以使产品翻转的动作。
六轴
第六轴安装法兰可以360°旋转。
七轴
随着能力的线性方向(通常为水平运动,沿着轨道从一个地方到另一个移动机器人)。
四轴和六轴焊接机器人的区别
四轴是为高速取放作业而设计,而多两个轴的六轴,则是有了更高的灵活性,因此具有更多的“行动自由度”。
四轴机器人
小型装配机械手中,“四轴机械手”是指“选择性装配关节机器臂”,即
四轴机械手的手臂部分可以在一个几何平面内自由移动。四轴机械手的前两个关节可以在水平面上左右自由旋转,第三个关节由一个称为“羽毛”的金属杆和夹持器组成
。该金属杆可以在垂直平面内向上、向下移动或围绕其垂直轴旋转,但不能倾斜。这种独特的设计使四轴机械手具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。在包装应用中,四轴机械手擅长高速取放和处理其他材料任务。
六轴机器人
六轴机器人的第一个关节能像四轴机器人一样在水平面自由旋转,后两个关节能在垂直平面移动。
此外,六轴机器人有一个“手臂”,两个“腕”关节,使它具有类似人类的手臂和手腕能力。
六轴机器人更多的关节意味着他们可以拿起水平面上任意朝向的部件,以特殊的角度放入包装产品内
,
执行许多由熟练工人才能完成的操作。而且可以节省人力开支,对于刚刚创立不久的企业来说,是很好的选择。
Note: The above article is reproduced in a third party and cannot represent the company's views. If it involves infringement, please contact the relevant rights holder to delete it.
Stock code: (000584.SZ)
Real-time stock market of HGZN