Chinese
English
Home
About
Introduction
Milestone
Culture
Member unit
Awards
Distribution
Intelligent Equipment
Platform for industrial robots
Scientific research
Introduction to academia sinica
Research field of academia sinica
Academia sinica research team
News
Company news
Industry news
Video center
Investor
Announcement
Governance
Securities information
Investor relations document
Investor services
Talent
Talent strategy
Job recruitment
Service
Partner
Service case
Download information
Contact us
Integrity Office
Chinese
English
Home
About
Introduction
Milestone
Culture
Member unit
Awards
Distribution
Intelligent Equipment
Platform for industrial robots
Scientific research
Introduction to academia sinica
Research field of academia sinica
Academia sinica research team
News
Company news
Industry news
Video center
Investor
Announcement
Governance
Securities information
Investor relations document
Investor services
Talent
Talent strategy
Job recruitment
Service
Partner
Service case
Download information
Contact us
Integrity Office
新科研成果!这些新的软执行器让机器人抓手更柔性!
作者:中国机器人网 日期:2019.10.18
加利福尼亚大学圣地亚哥分校的工程师已经开发出一种构建紧凑,便携式和多功能软机器人的方法。
他们通过制造柔软的管状致动器来实现这一进步,该致动器的运动受到电气控制,使其易于与小型电子元件集成。
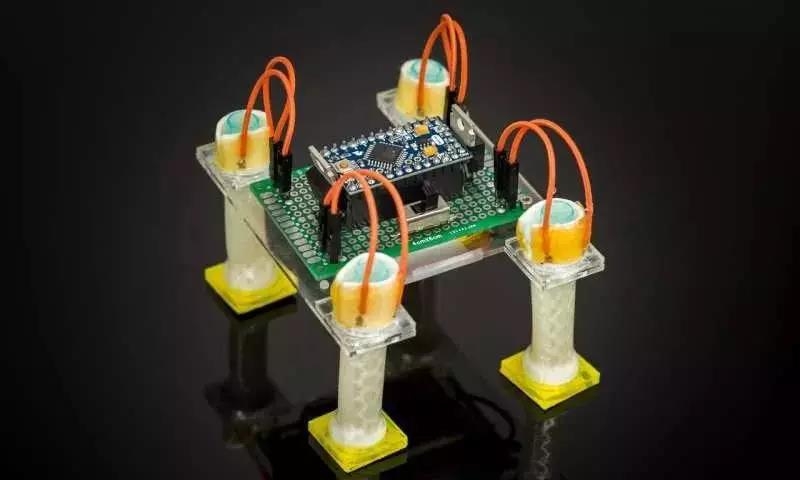
作为概念验证,工程师使用这些新的执行器构建了一个柔软的电池供电的机器人,该机器人可以不受约束地在平坦的表面上行走并移动物体,他们还建造了一个柔软的抓手,可以抓取小物件。
这个不受限制的软机器人由电气控制,具备四个软管状执行器,一个微控制器和一个电池组成,可以对机器人进行编程以步行或搬运物体。
该团队由加州大学圣地亚哥分校机械和航空工程学教授蔡胜强领导,于《科学进展》上发表了这项研究。
图片来源:David Baillot /加州大学圣地亚哥分校雅各布斯工程学院
大多数软执行器的问题在于它们具有庞大的设置。那是因为它们的运动是通过泵送空气或流体通过内部腔室来控制的。因此,使用这些类型的执行器构建机器人将需要把它们束缚到泵,大型电源和其他专用设备上,在当前的研究中,加州大学圣地亚哥分校的工程师创建了由电控制的软执行器。蔡说:“此功能使我们的管状执行器与大多数低成本的市售电子设备和电池兼容”。
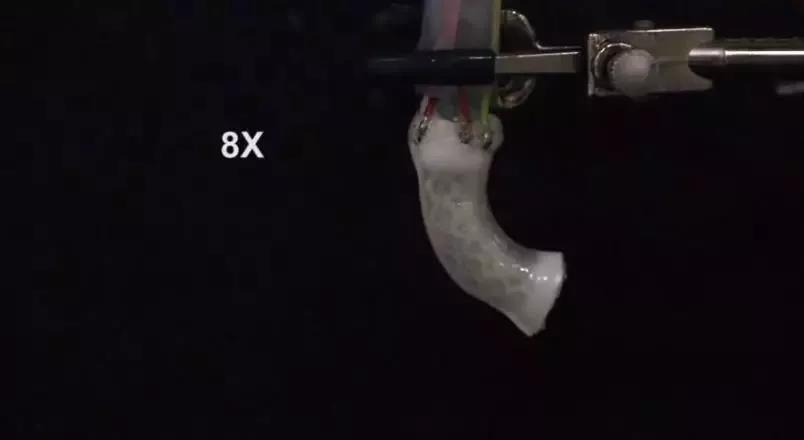
软机器人设备中的电控,软管状致动器。图源:何其光
致动器由用于机器人的人造肌肉的一种材料制成,称为液晶弹性体。它们由嵌入弹性聚合物网络中的液晶分子组成。
这些材料的独特之处在于,它们可以响应热或电等刺激而改变形状,移动和收缩,这与肌肉响应神经细胞信号的收缩方式相似。
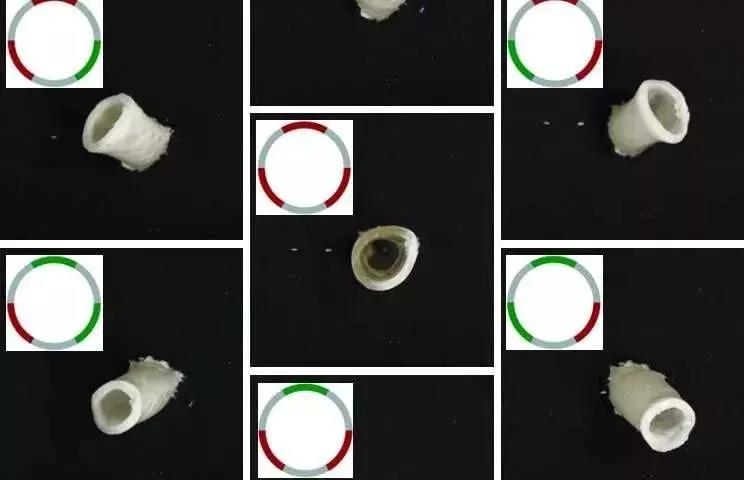
为了构造每个执行器,工程师将三根加热丝夹在两层液晶弹性体薄膜之间。然后将材料卷成管,进行预拉伸并暴露在紫外线下。可以独立控制每条加热丝,以使管子在六个不同的方向上弯曲。当电流通过一根或两根电线时,它会加热管子的一部分并使其向那些电线的方向弯曲。当电流通过所有三根导线传输时,整个管子会收缩,从而缩短长度。关闭电源后,灯管会慢慢冷却并恢复其原始形状。
可以对机器人进行编程以步行或搬运物体。图片来源:David Baillot /加州大学圣地亚哥分校雅各布斯工程学院
机械和航空航天工程博士学位的第一作者何其光说:“利用外部施加的电势可以很容易地对每个管状致动器的位置进行编程” 。加州大学圣地亚哥分校雅各布斯工程学院的学生。
将多个执行器结合在一起使工程师能够构建不同类型的软机器人。
他们使用四个执行器作为支腿,建立了一个不受束缚的行走机器人。该机器人由板上的小型锂/聚合物电池供电。他们还使用三个执行器作为手指构建了一个柔软的抓手。
取决于电加热的电热丝(红色),软管状致动器可以在六个不同的方向上弯曲(外图),并在长度上收缩(中心图)。图源:何其光
每个机器人都有一个板载微控制器,工程师可以在其中为执行器编程一系列电控运动,这使机器人可以独立移动。该团队现在正在研究可以更快移动的软执行器。当前的执行器需要大约30秒钟才能完全弯曲和收缩,最多需要4分钟才能恢复其原始形状。那是因为材料要花一些时间才能完全加热和冷却。他说,最终目标是使执行器能够像人的肌肉一样快速收缩和放松。
Note: The above article is reproduced in a third party and cannot represent the company's views. If it involves infringement, please contact the relevant rights holder to delete it.
Stock code: (000584.SZ)
Real-time stock market of HGZN